BSM-functie
BSM-functie
De Blind Spot Monitor maakt gebruik van radarsensoren om auto's te signaleren die in een aangrenzende rijstrook rijden in het gebied dat niet in de buitenspiegel is te zien (de dode hoek) en brengt de bestuurder hiervan op de hoogte via de indicator in de buitenspiegel.
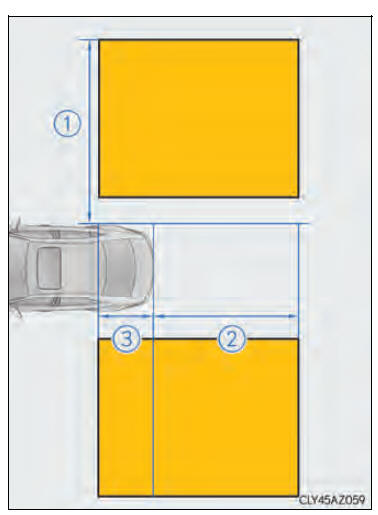
Detectiegebieden BSM-functie
Hieronder staan de gebieden aangegeven waarin auto's kunnen worden gesignaleerd.
Het detectiegebied reikt tot:
- Ongeveer 0,5 m - 3,5 m vanaf de
zijkanten van de auto*.
*: Het gebied tussen de zijkanten van de auto en 0,5 m vanaf de zijkant van de auto kan niet worden gesignaleerd.
- Ongeveer 3 m achter de achterbumper
- Ongeveer 1 m vóór de achterbumper
| WAARSCHUWING ■Waarschuwingen met betrekking tot het gebruik van de functie De bestuurder is volledig verantwoordelijk voor een veilig rijgedrag. Rijd altijd veilig en houd rekening met de omgeving. De BSM-functie is een aanvullende functie die de bestuurder er attent op maakt dat er zich een auto in de dode hoek van de buitenspiegels bevindt of snel van achteren nadert richting dode hoek. Vertrouw niet alleen op de BSM-functie. De functie kan niet beoordelen of u veilig van rijstrook kunt wisselen. Wanneer u alleen op de functie vertrouwt, kan dit leiden tot een ongeval met ernstig letsel tot gevolg. Aangezien het systeem onder bepaalde omstandigheden mogelijk niet goed werkt, dient de bestuurder altijd zelf de veiligheid te controleren. |
■ De BSM-functie werkt wanneer De BSM-functie werkt wanneer aan alle onderstaande voorwaarden wordt voldaan:
- De BSM-functie is ingeschakeld.
- De selectiehendel staat in een andere stand dan R.
- De rijsnelheid is hoger dan ongeveer 16 km/h.
■ De BSM-functie signaleert een auto wanneer De BSM-functie signaleert in de volgende situaties een auto in het detectiegebied:
- Een auto in een aangrenzende rijstrook uw auto inhaalt.
- Een andere auto binnen het detectiegebied komt wanneer deze van rijstrook wisselt.
■ Omstandigheden waaronder de BSM-functie een auto niet signaleert De BSM-functie is niet ontworpen om de volgende typen voertuigen en/of objecten te signaleren:
- Kleine motorfietsen, fietsen, voetgangers, enz.*
- Tegemoetkomende auto's
- Vangrails, muren, bebording, geparkeerde auto's en vergelijkbare stilstaande objecten*
- Auto's achter u die op dezelfde rijstrook rijden*
- Auto's die 2 rijstroken van uw auto verwijderd zijn*
*: Afhankelijk van de omstandigheden wordt er mogelijk een auto en/of object gesignaleerd.
■ Omstandigheden waaronder de BSM-functie mogelijk niet goed werkt
- Onder de volgende omstandigheden signaleert de BSM-functie
auto's mogelijk niet
correct:
- Als de sensor niet goed is uitgelijnd doordat de sensor of de omgeving ervan is blootgesteld aan hevige schokken
- Wanneer de sensor of de omgeving ervan op de achterbumper is bedekt door modder, sneeuw of ijs of wanneer er een sticker op is geplakt
- Bij het rijden op een nat wegdek als gevolg van slecht weer, zoals zware regenval, sneeuw, of mist
- Wanneer meerdere auto's naderen met slechts weinig ruimte tussen elke auto
- Wanneer er slechts weinig ruimte zit tussen uw auto en een auto achter u
- Bij een duidelijk verschil in snelheid tussen uw auto en de auto die binnen het detectiegebied komt
- Wanneer het snelheidsverschil tussen uw auto en een andere auto verandert
- Wanneer een auto het detectiegebied binnenkomt met ongeveer dezelfde snelheid als uw auto
- Wanneer uw auto vanuit stilstand wegrijdt, blijft een auto in het detectiegebied
- Bij het op- en afrijden van opeenvolgende steile hellingen, zoals heuvels, dalingen in de weg, enz.
- Bij het rijden op wegen met scherpe bochten, opeenvolgende bochten of oneffenheden
- Wanneer de rijstroken breed zijn of wanneer op de rand van een rijstrook wordt gereden en de auto op een aangrenzende rijstrook ver van uw auto vandaan is
- Bij het rijden met een aanhangwagen (auto's met trekhaakpakket)
- Wanneer voorwerpen zoals een fietsendrager op de achterzijde van de auto zijn gemonteerd
- Bij een duidelijk verschil in hoogte tussen uw auto en de auto die binnen het detectiegebied komt
- Direct nadat de BSM-functie is ingeschakeld
- Onder de volgende omstandigheden is de kans dat de
BSM-functie onnodig een auto
en/of object signaleert groter:
- Als de sensor niet goed is uitgelijnd doordat de sensor of de omgeving ervan is blootgesteld aan hevige schokken
- Wanneer de afstand tussen uw auto en een vangrail, muur, enz. die het detectiegebied binnenkomt kort is
- Bij het op- en afrijden van opeenvolgende steile hellingen, zoals heuvels, dalingen in de weg, enz.
- Wanneer de rijstroken smal zijn of wanneer op de rand van een rijstrook wordt gereden en een auto die op een andere dan de aangrenzende rijstroken rijdt het detectiegebied binnenkomt
- Bij het rijden op wegen met scherpe bochten, opeenvolgende bochten of oneffenheden
- Als de banden slippen of spinnen
- Wanneer er slechts weinig ruimte zit tussen uw auto en een auto achter u
- Wanneer een fietsendrager of een andere accessoire op de achterzijde van de auto is gemonteerd
- Bij het rijden met een aanhangwagen (auto's met trekhaakpakket)